In the previous article, we covered the EPA method to obtain a single contact point. In this final installment of the series, we will explore a technique to obtain all contact points in one go, focusing exclusively on boxes. For those interested in other shapes, additional resources will be provided at the end of the article.
Overview
- What are boxes?
- The algorithm
- References & the complete code
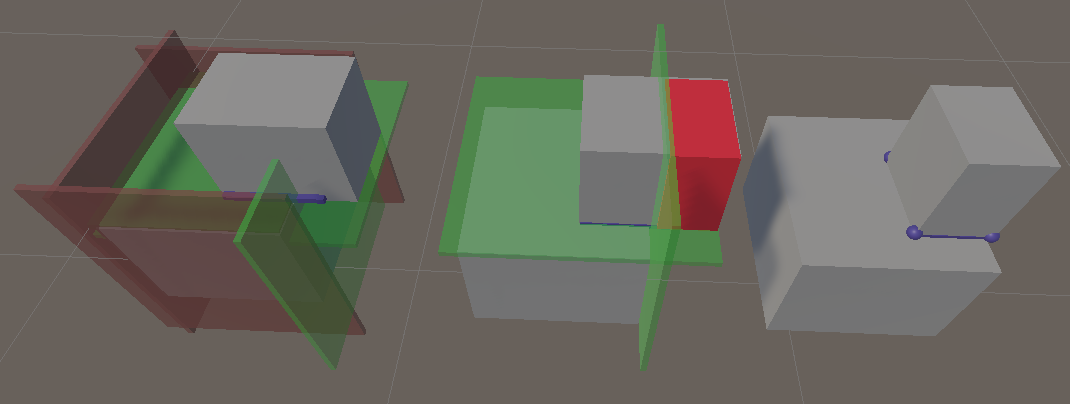
What are boxes?
Before we start looking at algorithms it's worth to properly describe what shape we are working with.
A box can refer to a shape both in 2D and 3D. In 3D it has 8 vertices and 6 faces that are at right angles with each other.
Therefore, the minimum data we'd need for our calculations are the box's extents in all 3 dimensions and its position.
However, to make our life easier we will also define the 8 vertices and the 6 face normals.
CVector3 position = GetTransform().getOrigin();
CVector3 dimensions = GetDimensions();
vertices[0] = GetTransform().getRotation() *
CVector3(position.getX() - dimensions.getX(), position.getY() - dimensions.getY(), position.getZ() - dimensions.getZ());
vertices[1] = GetTransform().getRotation() *
CVector3(position.getX() - dimensions.getX(), position.getY() - dimensions.getY(), position.getZ() + dimensions.getZ());
vertices[2] = GetTransform().getRotation() *
CVector3(position.getX() - dimensions.getX(), position.getY() + dimensions.getY(), position.getZ() + dimensions.getZ());
vertices[3] = GetTransform().getRotation() *
CVector3(position.getX() - dimensions.getX(), position.getY() + dimensions.getY(), position.getZ() - dimensions.getZ());
vertices[4] = GetTransform().getRotation() *
CVector3(position.getX() + dimensions.getX(), position.getY() + dimensions.getY(), position.getZ() + dimensions.getZ());
vertices[5] = GetTransform().getRotation() *
CVector3(position.getX() + dimensions.getX(), position.getY() + dimensions.getY(), position.getZ() - dimensions.getZ());
vertices[6] = GetTransform().getRotation() *
CVector3(position.getX() + dimensions.getX(), position.getY() - dimensions.getY(), position.getZ() + dimensions.getZ());
vertices[7] = GetTransform().getRotation() *
CVector3(position.getX() + dimensions.getX(), position.getY() - dimensions.getY(), position.getZ() - dimensions.getZ());
normals.push_back(GetTransform().getRotation() * CVector3(1.f, 0.f, 0.f)));
normals.push_back(GetTransform().getRotation() * CVector3(0.f, 1.f, 0.f)));
normals.push_back(GetTransform().getRotation() * CVector3(0.f, 0.f, 1.f)));
normals.push_back(GetTransform().getRotation() * CVector3(-1.f, 0.f, 0.f)));
normals.push_back(GetTransform().getRotation() * CVector3(0.f, -1.f, 0.f)));
normals.push_back(GetTransform().getRotation() * CVector3(0.f, 0.f, -1.f)));Planes
At the end of the algorithm we will also be working with planes. These can be defined by a single point and a normal vector. Aside from these values, we'll need two other functions:
checking its distance from a point and its intersection with a line/edge.
Here's what the plane class looks like:
struct CPlane {
CPlane() = default;
CPlane(const CVector3& a_Normal, CVector3 a_Point)
{
point = std::move(a_Point);
normal = a_Normal;
}
CScalar DistanceToPoint(CVector3 a_Point) const { return normal.Dot(a_Point - point); }
CVector3 Intersection(CVector3 p1, CVector3 p2) const {
//Return the intersection point of a line passing two points and this plane
return p1 + (p2 - p1) * (-DistanceToPoint(p1) / normal.Dot((p2 - p1)));
};
CVector3 normal;
CVector3 point;
The algorithm
While in this section we're going to work with boxes, the same principle can also be applied to any convex hull. Thanks to EPA, by the time we start the algorithm we already have the
contact normal. In this case, the penetration depth is not needed.
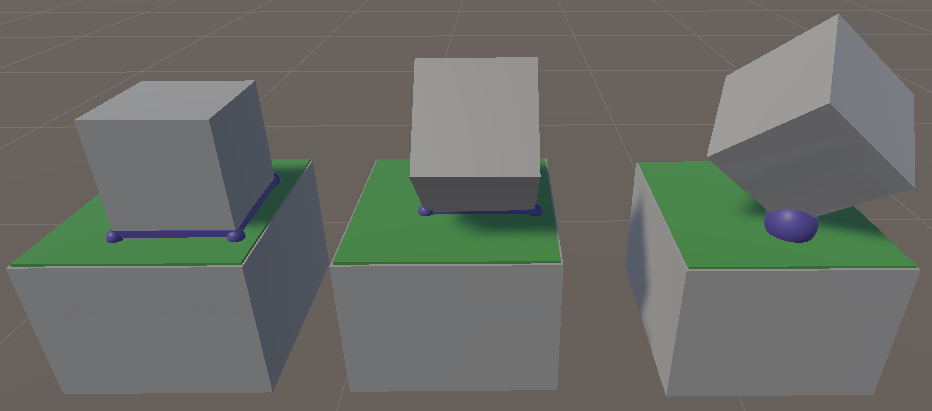
To summarize, in this algorithm we are going to find the two faces or edges (or in rare cases vertices) that are colliding. These are called the reference and incident faces.
Then you take every side plane of the reference face and clip it against the incident face. The clipped points are your contact points.
Now let's take a closer look:
- Finding the incident and reference faces
At the beginning of the algorithm, we should already have all vertices and face normals as outlined above. The easiest way to find the correct faces is simply by a dot product. If the dot product between the contact normal and a vertex is > 0 (at least in the case of a box) that means that that vertex is part of the face that constructs it Here, you can end up with 1, 2 or 4 points. These mean that you have either a vertex, edge or face contact respectively. We can retrieve the face normal either by calculating it on the spot using the cross product or by looking it up from your box class.
Here's how it looks in code: - Select the side planes of the reference face
These are the 4 sides you are going to clip against. Since we are already storing the face normals, we can easily find the ones that are perpendicular to it.

Code:// Calculate the top point of the reference face by getting the transform origin of the first object in the collision and adding the reference face normal multiplied by the box dimensions CVector3 top = m_Info->m_First->GetTransform().getOrigin() + (static_cast& ref = m_ReferenceFace.vertices; // Create a vector to store pairs of vertex indices std::vector
- Clip the side planes against the incident face
This is the most important part. Here, you can use any clipping algoritm you'd like, but generally the Sutherland-Hodgeman one is used. Here, you should get 4, 2 or 1 contact point depending on the type of collision you're working with (face, edge or vertex). If the number is higher, for example you found 8 contact points for a face contact, you need to also clip against the reference face.
for (int i = 0; i < 8; i++)
{
dots[i] = local.Dot(m_ReferenceBox[i]);
}
CScalar max = *std::max_element(dots, dots + 7);
for (int i = 0; i < 8; i++)
{
CScalar base = max - dots[i];
if (base < static_cast(0.001) && base > -static_cast(0.001))
{
m_ReferenceFace.vertices.push_back(i);
}
}
CScalar distance[2]
CVector3 vertex[2];
std::vector input;
for(auto& verts : a_Face.vertices)
{
input.push_back(a_Box[verts]);
}
// Create a vector to hold the vertices of the new face after clipping
std::vector new_face;
// Loop over all clipping planes
for (auto& plane : a_Planes)
{
// Initialize the first vertex and its distance to the clipping plane
vertex[0] = input[0];
distance[0] = plane.DistanceToPoint(vertex[0]);
// Loop over all input vertices
for (size_t j = 1; j <= input.size(); j++) {
// Compute the index of the next vertex (wrap around if at end)
size_t next = j % input.size();
// Get the next vertex and its distance to the clipping plane
vertex[1] = input[next];
distance[1] = plane.DistanceToPoint(vertex[1]);
// Case 1: Both vertices are inside the clipping plane
if (distance[0] <= 0.0f && distance[1] <= 0.0f || distance[0] > 0.0f && distance[1] > -CEPSILON && distance[1] < CEPSILON) {
// Add the next vertex to the new face
new_face.push_back(vertex[1]);
}
// Case 2: First vertex is inside and second vertex is outside
else if (distance[0] > 0.0f && distance[1] < CEPSILON) {
// Compute the intersection point between the plane and the edge
// and add it to the new face, followed by the next vertex
new_face.push_back(plane.Intersection(vertex[0], vertex[1]));
new_face.push_back(vertex[1]);
}
// Case 3: First vertex is outside and second vertex is inside
else if (distance[0] < CEPSILON && distance[1] > 0.0f) {
// Compute the intersection point between the plane and the edge
// and add it to the new face
new_face.push_back(plane.Intersection(vertex[0], vertex[1]));
}
// Update the first vertex and its distance to the clipping plane
vertex[0] = vertex[1];
distance[0] = distance[1];
}
// If the new face is empty, it means the original face was entirely clipped
// and there is nothing left to clip, so break out of the loop
if (new_face.empty()) { break; }
// Set the input vertices to the new vertices and clear the new face
input = new_face;
new_face.clear();
}
Yes. If you want contact points on the other body, you can simply switch up the reference and incident faces.
There are several ways to optimize this , for example by caching the results, however that's outside the scope of this article
References
- GDC 2015: Robust Contact Creation for Physics Simulation
You can find detailed description of other shapes such as capsules and meshes. - Implementation in my own project: box-box collision
Note: it has some differences compared to the code snippets found here. I simplified it for easier understanding.